Fin aout, dès potron-minet, alors que je m’en revenais de conter fleurette à la buraliste, que découvre-je sur une place de Serre-Chevalier ? Un engin insolite à forte densité neuronale, le Swincar. Véhicule dont le brillant concepteur roulant en Lotus Elise S1 Type 79 (Couleur JPS) est membre du Club Lotus France, ça ne s’invente pas, Pascal Rambaud, le monde est petit.
Si je devais noter sur une échelle de 1 à 10 les trucs les plus brillants que j’ai croisé ces dernières années, cet OVNI recevrait sans problème la note maximale au coté de la production McLaren. Pour ne rien gâcher nous sommes en présence d’un véhicule électrique. Mais qu’est-ce donc ? En fait un véhicule aux aptitudes tout terrain exceptionnelles. La cinématique permet l’inclinaison en virage, la correction des dévers et les croisements de pont les plus extrêmes. Ses suspensions indépendantes reçoivent à chacune de leurs extrémités des roues motorisées électriques, toutes directrices.
Imaginez une araignée mécanique à roulettes sortie de l’esprit génial de Tony Stark alias Iron Man. En fait, cet insecte résulte du travail d’un bureau d’ingénierie de la Drôme, Mecanroc, dirigé par Pascal. Pour finir de planter le décor sachez que ce concept fut :
– lauréat des Trophées Innovation et Tourisme Rhône-Alpes 2012
– labellisé Montagne Innovante et Internationale par le Cluster Montagne en 2013

Principes de fonctionnement
Nacelle pendulaire et direction multi-axes résument en quelques mots la bête.
Attardons-nous en premier sur le système pendulaire et comme un schéma vaut mieux qu’un long discours en voilà deux fort clairs. Ils présentent l’architecture d’un prototype d’une génération antérieure mais le principe reste le même.
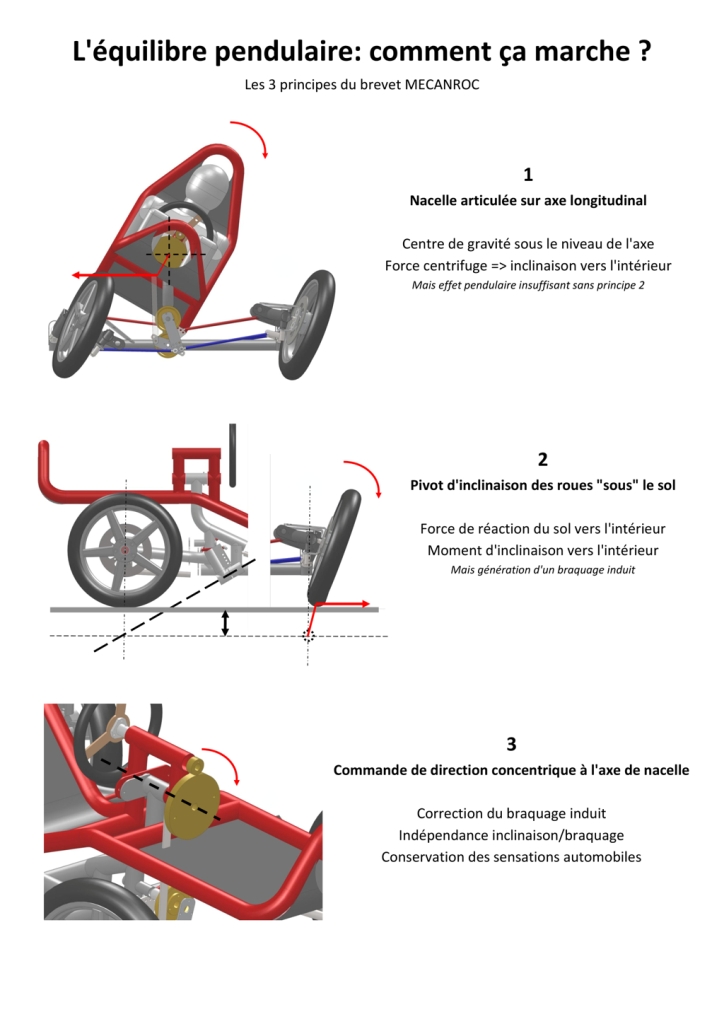
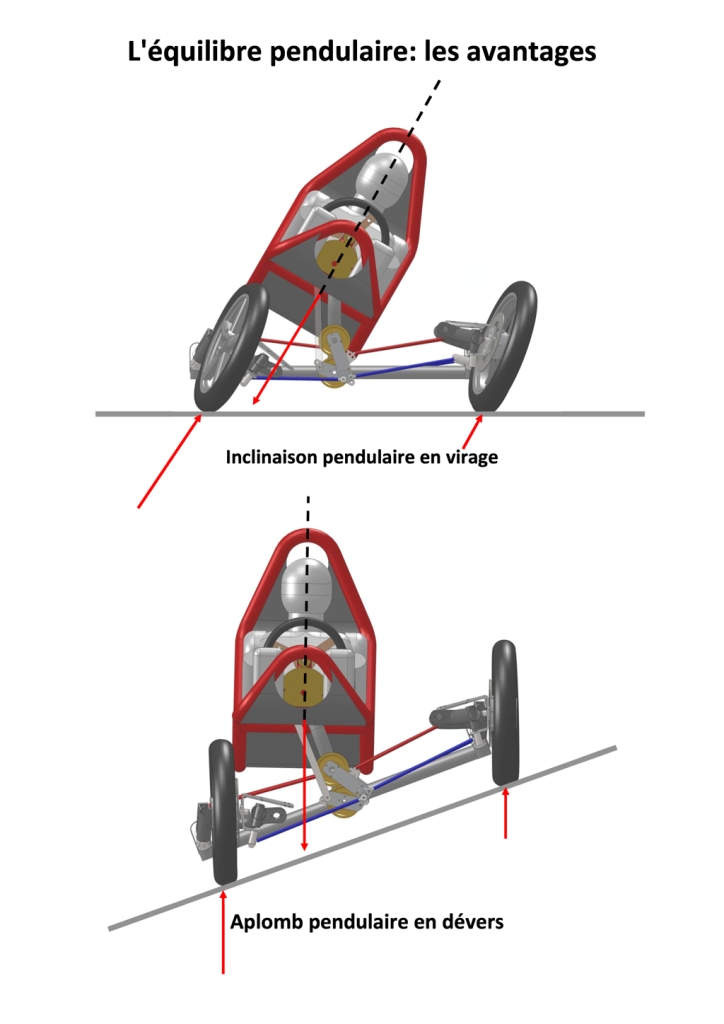
Comprendre que votre corps se positionne toujours à l’optimum du terrain et notamment de la pente, la position de la nacelle centrale s’adaptant au gré du relief et de votre angle de braquage.
Attardons-nous maintenant sur la direction, le véhicule fonctionne suivant cinq axes :
– Axe longitudinal Nacelle,
– Axe pivot direction (bras),
– Axe pivot inclinaison roue,
– Axe suspension,
– Axe roue.
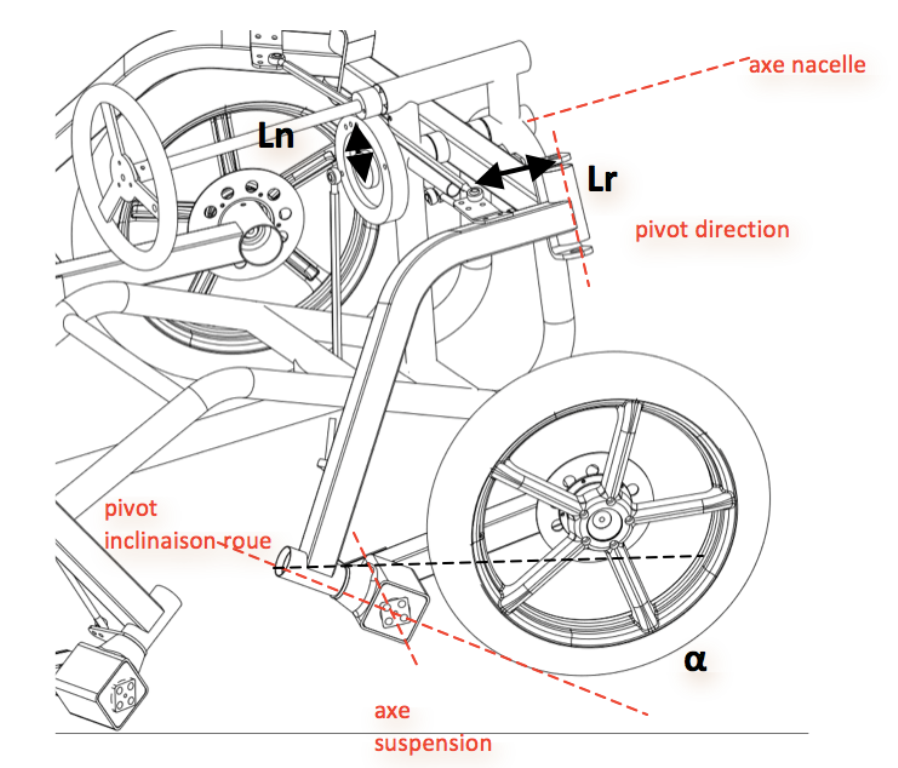
Schématiquement, Pascal explique : « Ce qu’il faut principalement retenir du système de direction est que le braquage induit par l’angle sur l’horizontale des pivots d’inclinaison des roues est compensé par un contrebraquage identique généré par l’inclinaison de la nacelle qui agit sur la couronne de commande de direction concentrique à l’axe de pendule de la nacelle. Il en résulte que quelle que soit l’inclinaison par rapport au sol, Swincar roule droit si le volant est droit par rapport au conducteur. Les sensations aux commandes ne sont donc pas modifiées par rapport aux habitudes automobiles. »
Architecture générale
Conçu entièrement en inox pour un poids total de 150 kg, Swincar est équipé de quatre roues directrices motrices électriques montées sur bras oscillant. Chacune d’elle tourne à la même vitesse, pas besoin de différentiel. Dans un virage la roue intérieure force tout simplement plus que celle extérieure à l’instar d’une conduite tout terrain. Le précédent prototype conçu le fut avec une transmission par courroie. Un mécanisme complexe difficilement maintenable et peu compatible avec l’industrialisation mais surtout fragile.
Allons droit au but, c’est génial mais passons en revue les composants de Swincar.
Les batteries
En standard le véhicule reçoit deux batteries de 1Kwh (20A/48v), soit 2Kwh, la capacité pouvant être doublée à 4kwh. La charge prend 2h max sur prise domestique. Les batteries sont de taille standard. L’autonomie varie en fonction du terrain mais d’origine le véhicule peut parcourir 600m de dénivelé et 25-30 km en randonnée montagneuse, sur route, en adoptant des pneus adéquates jusqu’à 60km. Merci la légèreté et encore nous parlons des prototypes, sur une version haut de gamme réalisée en titane un gain châssis de 25 kg est possible, augmentant de facto le rayon d’action.
Trains roulants
Les moteurs électriques situées dans roues sont d’une puissance nominale chacun de 600w, soit 2.4kw au total. Les prototypes existant reçoivent deux freins à disque à l’avant mais pour le modèle de série homologué quadricycle léger (V max = 45 km/h, P max = 4kw), quatre disques s’imposent. Notons aussi la présence de deux systèmes majeurs, l’un de régénération électrique au freinage, l’autre de frein moteur, non négligeable en descente. La vitesse maximum s’établie à 30 km/h mais la série se limitera à 25Km/h.

Autre innovation, les jantes de 16 pouces, conçues et réalisées sur mesure. En fait, la jante est usinée dans un seul bloc d’aluminium et reçoit le moteur électrique à couple constant. Les rayons évacuent la chaleur du moteur ce qui lui assure un température constante aussi bien en charge lors des montées qu’en conduite nominale sur terrain horizontal.

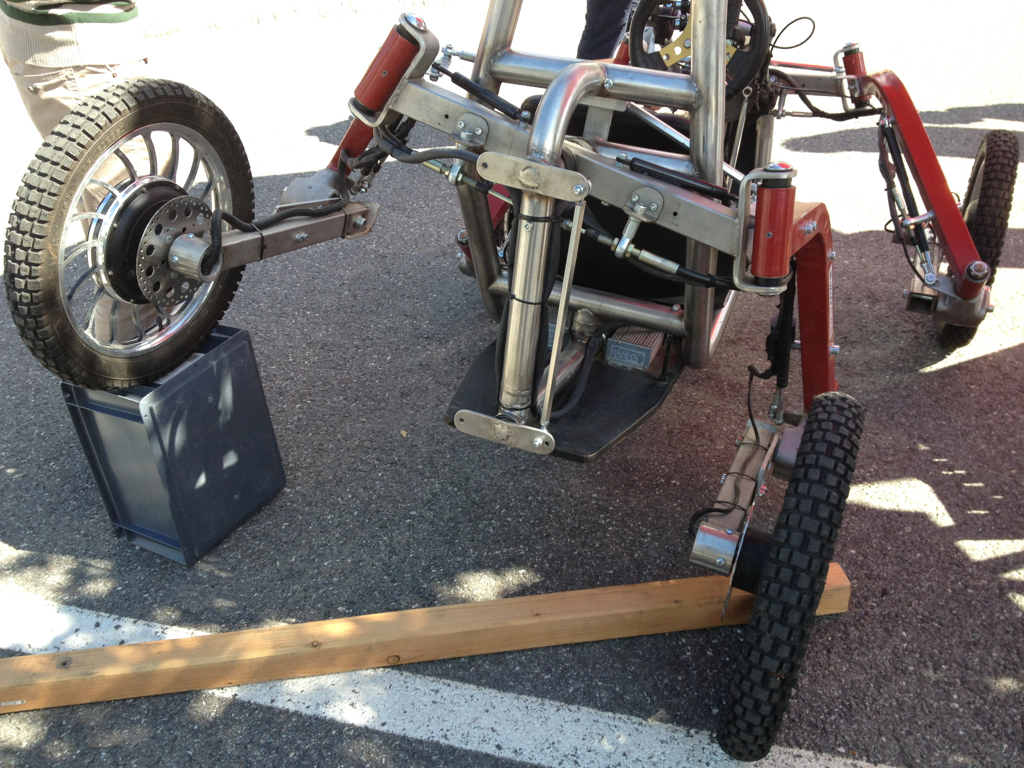
Suspensions
Chose intéressante, chaque « bras » reçoit une suspension composée d’un système bielle manivelle ST à oscillation libre de la société Suisse Rosta. (ICI la fiche technique). En fait, une pièce de fonderie d’Aluminium recevant en son centre des caoutchoucs enserrant un arbre. Monté incliné le système fort ingénieux est surtout fort endurant. Ce mécanisme exploité sur des équipements miniers nécessite un remplacement des caoutchoucs tous les huit ans, autant dire qu’ils sont garantis à vie sur cette araignée de 150 kg.

De plus, comme vous pouvez l’observer sur les photos ci-dessous, un câble push-pull (ICI fiche technique) trouve place sur chaque bras, il se termine coté tête de bielle Rosta par un amortisseur à gaz.


Pascal nous explique la raison : « Le mouvement pendulaire de la nacelle est associé à celui des roues par l’intermédiaire de câbles push-pull travaillant dans les deux sens. En théorie cette liaison mécanique n’est pas strictement indispensable (car chaque élément trouve son équilibre pendulaire) mais si on la supprime les roues changent d’assiette à chaque taupinière rencontrée.
L’avantage des câbles push-pull, dont les terminaisons sont des tiges coulissantes rigides associées à des rotules Unibal, est une grande commodité d’implantation et une grande robustesse par rapport à des biellettes rigides + basculeurs (exposées aux chocs) utilisées sur de précédents prototypes.
Les inconvénients sont de deux ordres : les frottements ne sont pas négligeables et il existe un jeu de 1 à 3mm inévitable selon la courbure des câbles. Ces jeux sont rattrapés par des ressorts à gaz qui agissent sur les mêmes biellettes d’inclinaison vissées sur les têtes de bielles Rosta et ont en même temps un rôle d’amortissement des mouvements d’inclinaison.
Les butées des gaines des câbles push-pull sur de grosses rotules Unibal sont réglables aux deux extrémités, ce qui permet de régler le carrossage à volonté. »
Pris en main du Swincar
Surprenant et déconcertant, accélérateur et frein se trouvent au volant. Pascal ne souhaitant pas compliquer le véhicule par l’adjonction de pédales, vous commandez l’accélérateur avec le pouce droit et le frein avec la main gauche via une palette derrière le volant.

La colonne de direction se positionne à la verticale pour faciliter l’accès tout comme l’on peut ouvrir l’angle des roues à 90° pour assurer l’accès à bord d’une personne paraplégique, ce qui fut testé avec succès !!! De petits vérins facilitent la manipulation sur l’arrière avec seulement 4-5 kg de poussée pour « ouvrir et fermer » les bras de roues. Ceux avant ne nécessitent aucun asservissement, le mécanisme de direction apportant l’assistance. Notons le montage de biellettes spécifiques pour cette configuration.
Une version pour personnes tétraplégiques est en projet. Pascal me confia avoir étudié la pathologie identifiant les seuls mouvements possibles du patient, notamment la rotation des poignets. La disposition latérale de joysticks rendrait cet usage possible.
Au volant
Après une présentation détaillée le matin, rendez-vous fut pris pour essayer le véhicule sur le bas des pistes de Serre-Chevalier l’après-midi.

Première observation, sur le prototype l’assise n’est pas réglable. Personnellement, je me pause dans le mini-baquet et trouve mes repères instantanément. Pascal me donne le conseil de toujours garder la main sur le frein, le conseil ne fut pas vain.
Ceci fait, je me lance suivant Pascal, ça pousse fort. L’accélérateur se commandant du pouce, la chose n’est pas trivial sur les premiers mètres.
Un premier obstacle s’offre à nous, un talus. Vicieux que je suis j’arrête volontairement le véhicule en plein milieu de la difficulté histoire de m’assurer de la motricité. Je donne un coup de pouce, l’expression n’ayant jamais était autant approprié, et démarre en trombe passant l’obstacle avec la dextérité d’une ballerine faisant une pointe, au passage les roues projettent l’herbe arrachée.
J’arrive sur un champ légèrement en pente, surplombé d’un magnifique monticule. Pour s’y rendre nous commençons notre parcours de légères arabesques. Je suis surpris de la parfaite motricité et surtout je commence à me familiariser tant bien que mal à l’accélérateur, mon pouce. Je note la présence d’une démultiplication dans la direction. A basses vitesses, malgré l’absence de différentiel, ni je survire, ni je sous-vire néanmoins plus la vitesse augmente, à l’instar d’une Caterham équipée d’un LSD, les quatre roues motrices et directrices écartent le véhicule vers l’extérieur du virage obligeant à braquer de plus, sous-virage corrigeable naturellement à l’usage et complètement transparent au final. Avec le recul, mon essai étant bref, je me demande si ce que je prends pour du sous-virage ne serait pas une perte de mes repères habituels. Je m’attends comme pour un kart à gérer le survirage à l’accélérateur mais, nada, rien, j’éprouve toutes les difficultés à faire glisser le véhicule même sur l’herbe grasse que je tonds littéralement, impressionnant.
Autant vous avertir, la souplesse du pouce prime car l’engin vous distille des accélérations brutales.

Puis arrive la partie la plus amusante, le passage du monticule dans tous les sens, de face, de biais, de travers, le tout avec une facilité et un confort déconcertant. S’enhardissant, mon pouce s’impatiente, il en résulte des accélérations foudroyantes.
Concernant les capacités de franchissement il suffit de visionner cette vidéo pour valider les capacités du véhicule.
Voilà que mon essai se termine mais avant le point final il nous faudra revenir au point de départ en descendant une marche de pierres et d’herbes de pas loin d’un mètre de très forte déclinaison. Là, je commence à me liquéfier, sachant mon dos peu adepte de l’exercice, ben non, rien ne se passe. Je me place littéralement sur l’obstacle, les deux roues avant dans la descente, l’une sur une pierre, l’autre dans l’herbe, puis donne une nouvelle pichenette du pouce et passe sans problème. Je ne sais comment l’engin gère l’obstacle mais me voilà en bas mon intégrité préservée. Chouette.
Ci-dessous Pascal passant le dit obstacle.

Notons le travail des « bras » sur le franchissement par cet essayeur.

Et me revoilà à réaliser les dernières arabesques avec Pascal, un vrai tango des montagnes, accélérant fortement en sortie de virage, tentant de provoquer glissades et dérapages mais difficile de faire décrocher l’engin, le tout possède une stabilité salvatrice. Cet engin s’apparente à une nacelle de grand huit.
Soyons honnête, la gestion de l’accélération au pouce n’est pas simple pour un néophyte, surtout pour le gaucher que je suis. Ce qui évidemment rend l’expérience moins ludique mais avec un peu d’entrainement cela paraît jouable surtout pour un amateur de console de jeux. D’ailleurs lorsque j’observe Pascal manier l’engin rien ne paraît insurmontable. Au risque de me répéter, la motricité mérite un oscar.
Conclusion
Habitué à poser mon séant dans des engins (bien) plus puissants, j’avoue m’être franchement amusé sans bruit, sans CO2, sans provoquer l’ire des locaux.
Pascal Rambaud travaille actuellement au lancement d’une présérie mais d’autres projets se bousculent dans sa marmite à idées. Par exemple, à l’instar du Big Dog de Boston Dynamics, Mecanroc travaille sur une version militarisée pour la DGA, un suiveur de troupes. Des sociétés de location semblent aussi intéressées même Massey Ferguson trouve le concept intéressant. Qui sait, peut-être une exploitation pour véhicules agricoles à venir ? Un enjambeur viticole ? Les déclinaisons pullulent même une version biplace. Pas surprenant que la conception de Swincar ait abouti à la dépose de brevets majeurs, deux pour être précis, l’un pour la nacelle et l’autre pour la direction.
Ce projet est conçu et réalisé en France. La commercialisation débutera normalement en 2015 et la production sera localisée dans l’hexagone. Le prix commerce s’établira à 12.000€. Rien à dire à la vue de VTT à 7000. Notons que le premier prospect sérieux est étranger. De quoi favoriser la balance commerciale extérieure Française.
La presse automobile devrait s’intéresser au bonhomme qui ne manque pas d’idées et se montrer solidaire avec ce stakhanoviste car « ce projet nécessita beaucoup de travail, beaucoup de patience et surtout beaucoup, beaucoup de temps et passion ».
Pascal passera à l’autonome sur des plateaux TV notamment :
– dans l’émission INVENTER DEMAIN qui sera diffusée par trois chaines : FR3 Rhône-Alpes, FR3 Franche-Comté et RTS (Suisse)
– en tant qu’inventeur du concept Swincar pour une émission de présentation de trois minutes comme vingt autres entrepreneurs dans chacune des trois régions.
– au sein de Rhône-Alpes, sélectionné pour une émission de vingt-six minutes.
Encore un grand merci à Pascal Rambaud et Jérôme Arsac pour leur accueil et patience à m’expliquer tous les détails et encore je n’en transcris qu’un partie !! Si vous voulez en savoir plus sur cette superbe pièce d’ingénierie, allez faire un tour sur le site internet de la marque : http://www.swincar.fr. Ce fut un plaisir et une chance de croiser la route de Pascal et merci à Serre-Chevalier pour l’organisation d’un petit salon du véhicule électrique, les rencontres peuvent s’y avérer passionnantes.




Tout simplement GENIAL !
Hâte de voir le produit évoluer : + puissant, + rapide, + d’autonomie…
Pourquoi pas le voir aussi participer à un Dakar (Utopie ou réalité possible…)
Pour ceux qui disent que le temps des inventions c’est fini, voici un bon exemple.
Je suis ingénieur mécanique de formation et je ne crois pas encore mes yeux.
Merci et Bravo Mr « SWINCAR »
Je suis sure que cette invention aura beaucoup d’avenir et sera certainement plus développée.
Bonjour, Oui merci a l’inventeur d’un génie de malade !!! JE suis paraplégique et ancien amoureux de la nature silencieuse, les balades en foret …je vous le dis, j’aimerais vraiment en avoir un dans les 1er …moyens limités chez moi, mais ce truc me rendrais une autonomie xxxxl, petit fils de paysan, j’ai pas mis les pieds ds un champs depuis 5ans déjà …j’en suis navré et pressé de pouvoir tester et utiliser ce Swincar ! Comment l’obtenir svp ….contact a lechevalierbenoit@hotmail.fr, MERCI.
Un seul mot :FABULEUX !!!!
Commercialisé ou et quand ?
Cordialement
RD
Le hauteur du siège est d’environ 40cm mais elle varie au gré de la garde au sol réglable. Il est possible d’installer le siège plus haut mais c’est forcément un peu au détriment de l’effet pendulaire. Un siège baquet est possible mais pas forcément souhaitable pour des questions de facilité de transfert et du fait que le conducteur ne subit pas de force latérale.
SWINCAR by MECANROC
Bonjour et bravo pour ce véhicule très original qui gomme toute les difficultés du terrain, avec tant de faciliter (vu sur YouTube). C’est génial ! Je suis devenu handicapée suite a un accident de moto. Mais, j’aime toujours autant le pilotage (tout terrain). C’est pour moi un très bon compromis. Est il possible de monter des roues de 24 pouces ? Afin d’avoir une assise + haute ? Quel est sa hauteur de siège ? Est il possible de placer un siège bacquet à la place du siège d »origine ?
J’espère ne pas vous prendre trop de temps,
Merci d’avance pour vos réponses,
J’habite la Côte ‘D’azur proche de Monaco.